Using Nexus Vox with your prefered microcontroller
Raspberry Pi Pico
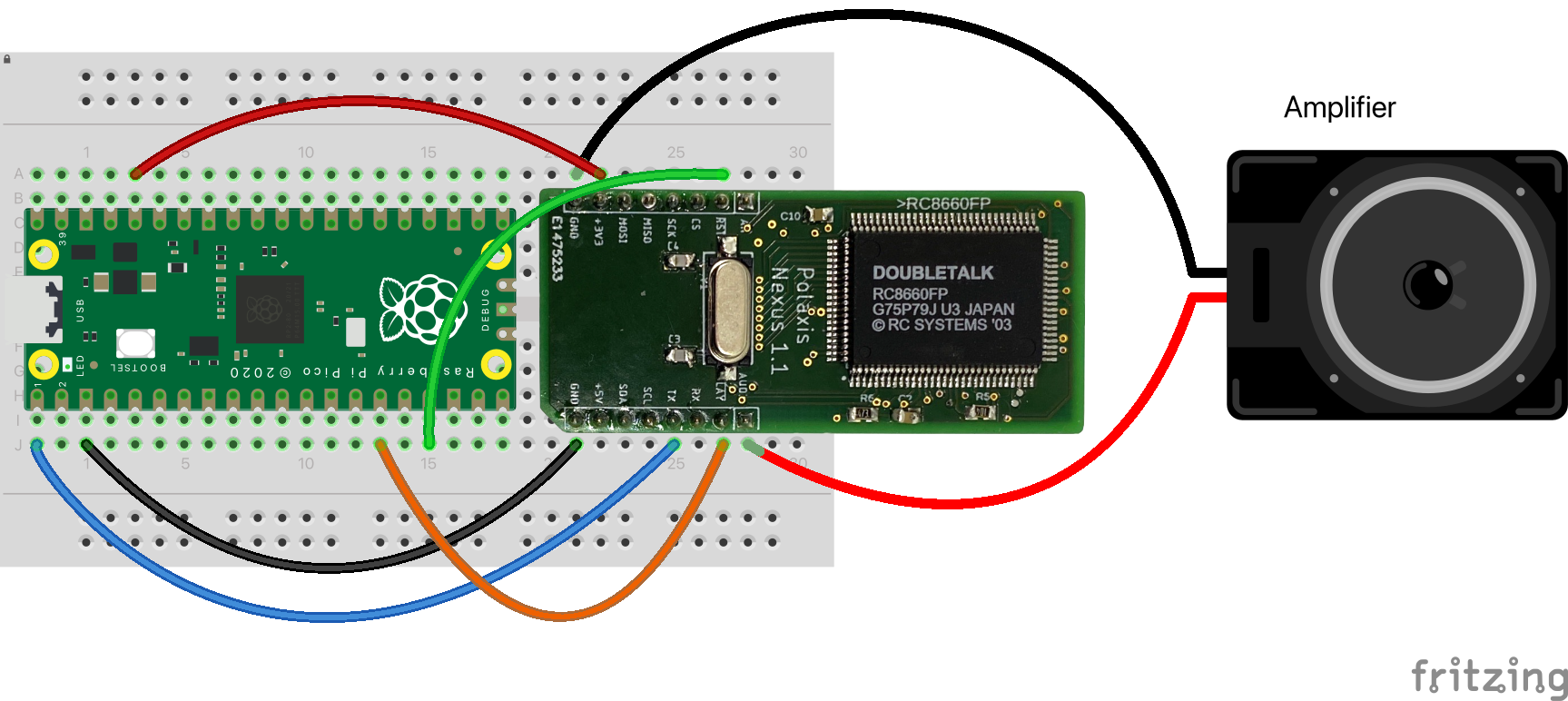
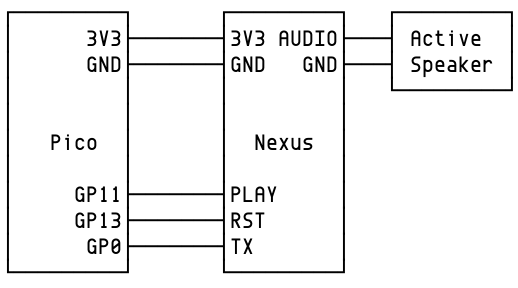
Getting started with Nexus is easier than you might think: all you need is a basic serial connection and two optional pins!
Please note that the TX pin connects to the TX pin on the microcontroller as well.
With just a few lines of code, you can bring the voices of characters like ‘Perfect Paul’ and ‘Vader’ to life, all through a simple setup.
Her is an example showing how to configure a Raspberry Pi Pico to communicate seamlessly with Nexus and explore its full potential.
#include <Arduino.h>
#include
auto &Nexus = Serial1;
#define RST 13 // Reset pin (active LOW)
#define PLAY 11 // Busy Speaking pin
String voiceLabel[11] = {"Perfect Paul", "Vader", "Big Bob", "Precise Pete", "Ricochet Randy", "Biff", "Skip",
"Robo Robert", "Goliath", "Alvin", "Gretchen"};
// Turn on the BUILTIN LED when speaking
void Talking(void)
{
digitalWrite(LED_BUILTIN, digitalRead(PLAY));
}
void setup()
{
// initialize pins
pinMode(RST, OUTPUT);
pinMode(PLAY, INPUT_PULLUP);
pinMode(LED_BUILTIN, OUTPUT);
attachInterrupt(digitalPinToInterrupt(PLAY), Talking, CHANGE);
// Reset Nexus
digitalWrite(RST, LOW);
delay(2);
digitalWrite(RST, HIGH);
// Stabilize Audio
delay(1000);
// Initialize Nexus
Nexus.begin(115200);
Nexus.println("Anything to sample the baud rate");
delay(100);
// Set control command to \a
Nexus.write(0x1);
Nexus.write(0x07);
Nexus.println("\a8S Welcome, to the machine."); // Ajust speed
delay(1000);
}
void loop()
{
for (int i = 0; i < 11; i++)
{
// Construct the control sequence for the voice change dynamically
Nexus.print("\a"); // Start with the control character
Nexus.print(i); // Append the voice number dynamically
Nexus.print("o"); // Add the 'o' to control the voice
// Now print the message with the dynamically set voice
Nexus.print(" Hello, my name is ");
Nexus.print(voiceLabel[i]);
Nexus.println(".");
delay(3000);
}
}